在传统的导航方案中,激光雷达的高昂成本是导航机器人难以量产落地的主要原因之一,而深度相机具有成本低且同时具有3D深度信息与图像信息等优点,所以利用深度相机作为主传感器不仅可以有效降低成本,也可以更容易地进行多模态数据的融合。首先,我们设计了如图所示的基于深度强化学习的多传感器导航系统框架。
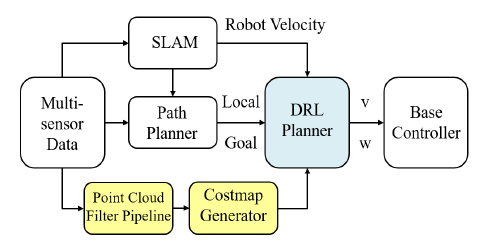
图 多传感器导航系统框架
SLAM模块:基于传感器数据建立环境地图,并在地图上估计机器人的速度和位置。
路径规划模块:传感器数据和地图作为输入,该模块生成从当前位置到目标位置的路径或局部目标点序列。
costmap生成器模块:为了处理各种三维环境,需要对多传感器数据进行精确和一致的实时自我中心映射表示
点云滤波管道模块:以深度摄像机构建的点云数据作为输入,通过对点云进行预处理,生成costmap生成器的输入
基于深度强化学习的局部规划模块:输入包括来自生成器的成本映射、全局路径规划生成的局部目标和SLAM模块生成的速度信息三部分,输出规划的控制速度。
本地规划器:输出实际的控制命令,即线速度和角速度,用于基础控制器模块驱动机器人。
由于深度相机存在视野较为狭窄的问题,所以在基于深度强化学习的局部规划模块中引入了如图6所示的循环神经网络模块,记忆关键的场景信息,获取数据间的关联性,从克服了小视野的问题。
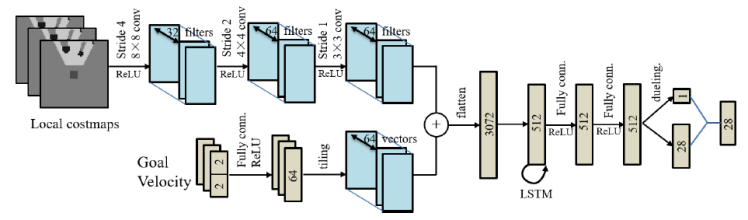
图 基于DRQN的深度强化学习局部规划网络
