基于多学习模型池的数据融合
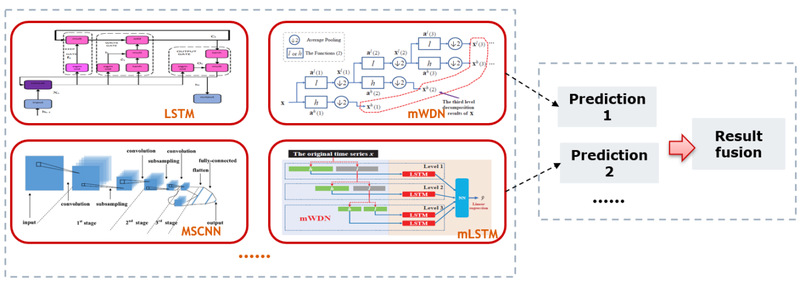
汽车的自动驾驶依靠各种传感器来感知环境,每种类型的传感器都有自己的优点和缺点,为了建立他们周围世界的一致模型,并在其中安全地工作,需要融合不同传感器的数据。多传感器对应多类型的数据,很难找到适合所有数据类型的模型。为了应对这一挑战,我们提出了基于多学习模型池的数据融合策略。该策略通过分析各类数据特点,有针对性地搭建不同的深度学习模型,如数据分解、时序数据、图像数据等模型,构成学习模型池。利用平均后融合方法对不同模型得到的数据结果进行融合。该方法可以提高感知精度与粒度。大量实验表明,基于多学习模型池的数据融合策略与单模型相比有更高的感知精度。同时,与现有的网络模型CNN、RNN相比误差可降低15.9%、48.4%。我们还验证了平均后融合方法中权重参数的变化(0到1之间)对感知精度的影响,发现当参设置在0.55时误差最小。