无人驾驶中汽车需要实时获取自身位置信息,但是在网络通信不畅等外界因素干扰下,难以不依赖于外界信息而实现自身的实时定位。所以需要利用自身的传感器数据,通过构建单目视觉图像深度预测网络、光流预测网络、几何推理预测等模块组成的基于深度学习方法和几何约束的视觉里程计框架,实现仅基于视觉图像信息进行自身实时定位。
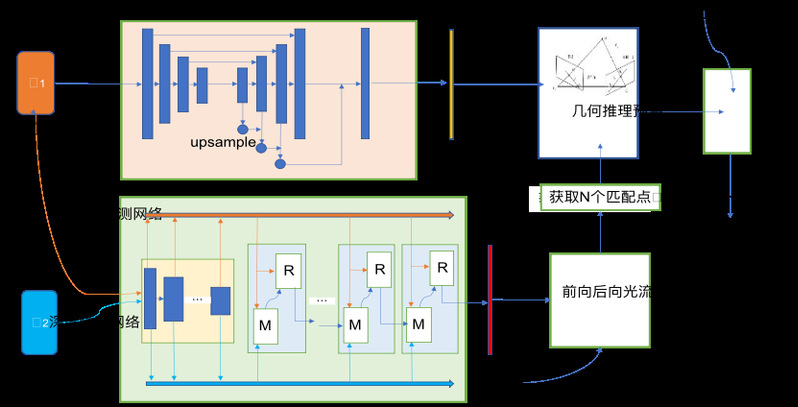
图1 基于深度学习方法和几何约束的视觉里程计框架
无人驾驶中汽车需要实时获取自身位置信息,但是在网络通信不畅等外界因素干扰下,难以不依赖于外界信息而实现自身的实时定位。所以需要利用自身的传感器数据,通过构建单目视觉图像深度预测网络、光流预测网络、几何推理预测等模块组成的基于深度学习方法和几何约束的视觉里程计框架,实现仅基于视觉图像信息进行自身实时定位。
图1 基于深度学习方法和几何约束的视觉里程计框架
地址:安徽省合肥市蜀山区黄山路443号中国科学技术大学西校区
|
|
