在无人驾驶汽车的目标追踪任务中,在进行长时间跟踪时,非常容易遇到物体被遮挡的情况,造成跟踪目标丢失。当目标在往后帧中再次出现时不能正确恢复目标,从而导致目标彻底丢失。
为了尽量避免出现目标丢失的情况,采用基于RPN的总体架构,加上local-to-global的搜索策略和数据增强方法来进行学习,即在训练跟踪器的过程中随着目标消失帧数的增加,而逐渐扩大目标搜索区域;和通过增加同类与不同类别的正负样本去增强数据进行学习,从而增强了目标跟踪算法的鲁棒性。
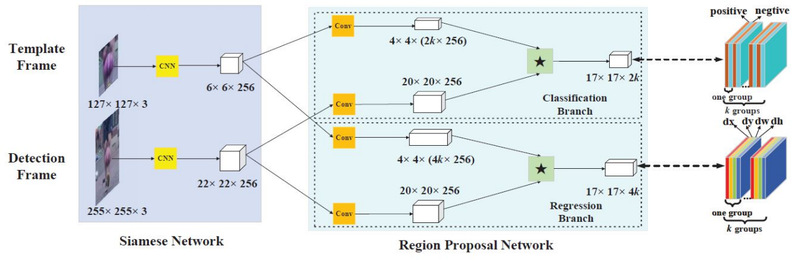
RPN整体框架
在无人驾驶汽车的目标追踪任务中,在进行长时间跟踪时,非常容易遇到物体被遮挡的情况,造成跟踪目标丢失。当目标在往后帧中再次出现时不能正确恢复目标,从而导致目标彻底丢失。
为了尽量避免出现目标丢失的情况,采用基于RPN的总体架构,加上local-to-global的搜索策略和数据增强方法来进行学习,即在训练跟踪器的过程中随着目标消失帧数的增加,而逐渐扩大目标搜索区域;和通过增加同类与不同类别的正负样本去增强数据进行学习,从而增强了目标跟踪算法的鲁棒性。
RPN整体框架
地址:安徽省合肥市蜀山区黄山路443号中国科学技术大学西校区
|
|
